
Krótka historia wielowirnikowców
Początki wielowirnikowców sięgają zasadniczo początków lotnictwa, przy czym na myśli mam pierwsze latające aerodyny (nie aerostaty). Omawiana historia wielowirnikowców nie będzie też zawierała historii helikopterów, choć te w układzie koaksialnym (dwa wirniki w jednej osi obracające się w przeciwnych kierunkach) też można uznać za „wielowirnikowiec”. Skupię się tutaj na stosunkowo krótkiej historii wielowirnikowców, których wirniki znajdują się na osobnych oddalonych od siebie ramionach i przypominają już w swojej budowie obecne konstrukcje tego typu.
Czemu nie helikopter z jednym wirnikiem głównym?
Czemu na początku XX w. nie zbudowano tradycyjnego helikoptera z tylnym rotorem na ogonie? Próby takich konstrukcji oczywiście były podejmowane, ale nie były satysfakcjonujące dla ich autorów. Powodów było kilka. Przede wszystkim uważano taki układ za zbyt skomplikowany i nieefektywny. Tylny wirnik na ogonie zużywał od 10 do 15% mocy silnika napędzającego nie tworząc przy tym żadnej siły nośnej, która mogłaby oderwać maszynę od ziemi. Tylny rotor nie powodował również pochylenia maszyny, by mogła poruszać się do przodu lub do tyłu. Służył jedynie do powstrzymywania obracania się kadłuba.
Kolejny argument był taki, że główny wirnik w tym układzie tłoczy powietrze wprost na kadłub, przez co znów traci sporo na efektywności, dociskając go do ziemi. Było to również mało komfortowe dla samego pilota, który miał siedzieć bezpośrednio pod wirnikiem.
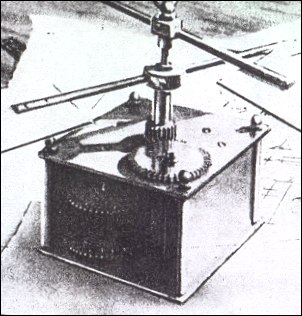
Trzecia rzecz, która stanowiła problem wynikała z ówczesnych ograniczeń technicznych – by zastosować jeden główny wirnik, jego łopaty musiały być odpowiednio długie, a co za tym idzie – były również dużo cięższe. Ciężko było je wytwarzać, ale problem stanowił również z ich napęd – potrzebny był jeszcze większy silnik gotowy obracać dużymi ciężkimi łopatami z dużą prędkością. Pamiętajmy, że to były czasy początków lotnictwa więc dostęp do silników był wtedy bardzo ograniczony. Bracia Wright w 1903 roku do swojego Flyer’a zastosowali już silnik paliwowy z dwoma śmigłami obracającymi się w przeciwnych kierunkach, ale to był płatowiec – główną siłę nośną wytwarzał na skrzydłach, statecznikach i sterach. W wielowirnikowcach cała siła nośna miała zostać wytworzona na samych łopatach śmigieł. Dlatego pionierom lotnictwa, którzy eksperymentowali z wielowirnikowcami łatwiej było używać mniejszych śmigieł i umieszczonych z dala od centrum maszyny na ramionach. Były one napędzane przeważnie jednym tylko silnikiem głównym poprzez specjalne pasy lub przekładnie.
Helikoptery z wirnikami w układzie coaxial
Helikoptery jednak powstawały, ale w nieco rzadziej spotykanym obecnie układzie koaksialnym (coaxial), w którym nie było ogona i tylnego rotora. Siła obrotu kadłuba (torque) pochodząca od jednego głównego wirnika była niwelowana drugim wirnikiem, umieszczonym w jednej tej samej osi, przeważanie o tych samych rozmiarach, napędzanym tym samym silnikiem, ale obracającym się w przeciwną stronę. Co ciekawe koncept takiego helikoptera powstał już w XVIII wieku, ale co do tego – kto był pierwszy – są pewne rozbieżności. Z jednej strony jest przypisywany Mikhailowi Lomonosovi – rosyjskiemu uczonemu, poecie i wynalazcy. To on prawdopodobnie po raz pierwszy stworzył prawdziwy model helikoptera w układzie coaxial w 1754 roku i zaprezentował go przed Rosyjską Akademią Nauk.
W Wielkiej Brytanii podobny projekt helikoptera w układzie koaksialnym został opatentowany przez Henry’ego Bright’a w 1859 roku, ale dużo przed nim – w 1796 roku, model helikoptera w takim układzie zbudował Sir George Cayley – ważne nazwisko dla lotnictwa – nazywany jest czasem Ojcem Awiacji.
Gdzie obecnie można spotkać takie układy coaxial? Są one spotykane nawet w cywilnych wielowirnikowcach – najlepszy przykład to hexacoptery w układzie Y6 lub IY6 oraz oktokoptery w układzie X8 lub +8, ale można spotkać również takie „monstrum” jak poniżej – 12-stilnikowiec HYDRA 12 z silnikami w układzie koaksialnym.

Przejdźmy do klasycznych wielowirnikowców
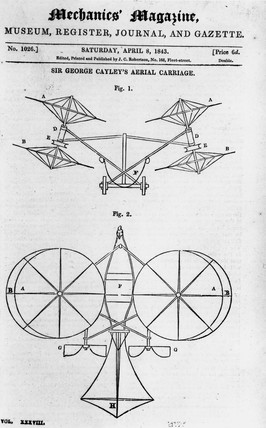
Wspomniany już wcześniej Sir George Cayley już w 1843 roku przedstawił koncept wielowirnikowca w hybrydowym układzie, w którym występowały już 4 specyficzne śmigła, ale zestawione w parach w układzie koaksialnym. Maszyna nosiła nazwę „Aerial Carriage” i wyglądała tak:
Pierwsze próby budowy wielowirnikowców w układzie niekoaksialnym – z wirnikami na osobnych wałach, osiach, rozmieszczone z dala od siebie – zaczęto prawdopodobnie podejmować we Francji w pierwszym 10-leciu XX wieku.
Paul Cornu i jego dwuwirnikowiec z 1907 roku jest uznawany za pierwszą tego typu maszynę, która z sukcesem uniosła na swoim pokładzie człowieka. „Lot” trwał około 20 sekund, a maszyna unosiła się w powietrzu na wysokości… około 30 cm. W zasadzie był to jedynie nie do końca kontrolowany zawis w powietrzu. Cornu odbył jeszcze kilka takich lotów, ale nie wnosiły one nic nowego. Ostatecznie konstruktor pierwszego załogowego dwuwirnikowca, bez dalszych sukcesów w tej materii, zajął się produkcją rowerów ;).
Niezależnie od Paula Cornu bracia Jacques i Louis Bréguet oraz Charles Richet zbudowali swój pierwszy quadcopter w tym samym roku (1907) – nosił on nazwę Bréguet-Richet Gyroplane (lub Gyroplane No 1). Maszyna wprawdzie oderwała się od ziemi, ale była bardzo niestabilna, unosiła się w powietrzu jedynie przez krótki czas i dodatkowo była podtrzymywana od dołu przez kilka osób. W odróżnieniu od maszyny Paula Cornu – nie była też załogowa, unosiła jedynie swój własny ciężar, ale pewnego rodzaju osiągnięciem było wykorzystanie do tego celu aż osobnych 4 śmigieł.
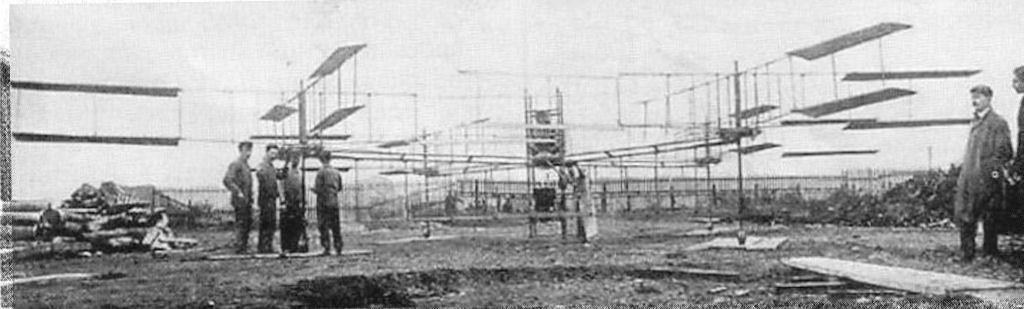
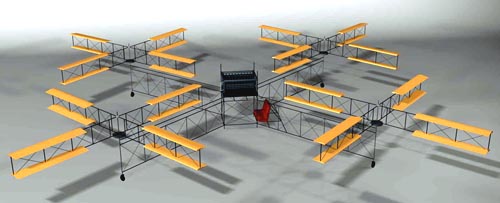

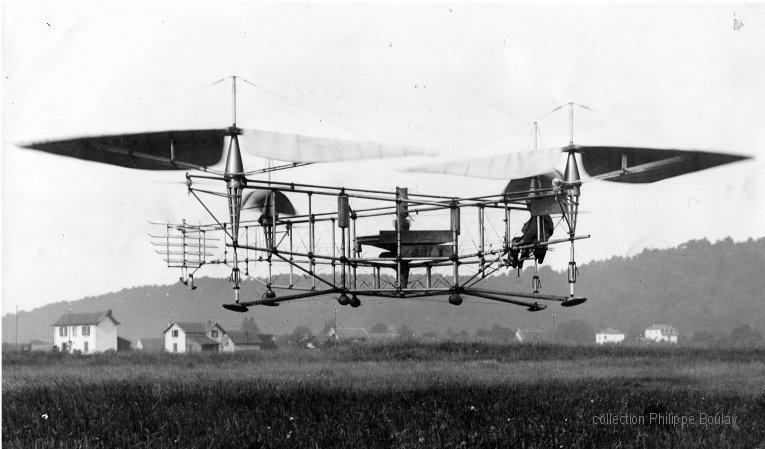
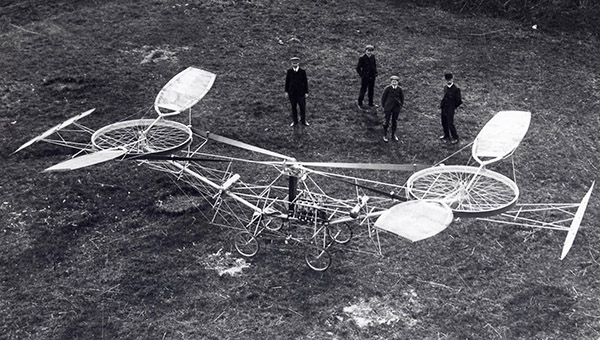
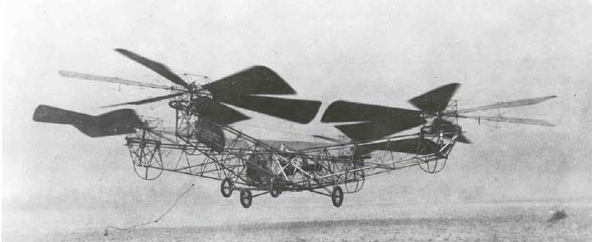
W 1920 roku Étienne Oehmichen zbudował maszynę latającą o nazwie Oehmichen No.2, która pozwalała dawać nadzieję na praktyczne i szersze wykorzystanie wielowirnikowców w lotnictwie. Oehmichen No.2 pobił najpierw rekord długości lotu, który wyniósł 360 metrów, a następnie – jeszcze w tym samym roku – przeleciał po okręgu dystans 1km w czasie 7 minut 40 sekund.
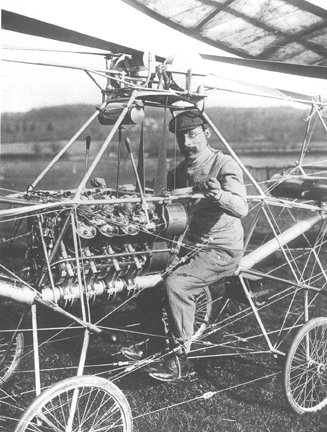
W roku 1922 Georde de Bothezat wraz z Ivan Jerome wykonali pierwsze loty swoim quadcopterem przeznaczonym stricte dla U.S. Army. Nosił on nazwę Jerome-de Bothezat Flying Octopus. Kilka lotów próbnych zakończyło wprawdzie się sukcesem, ale ostatecznie projekt nie został przyjęty przez wojsko z racji stabilności maszyny podczas lotu (w 1924 U.S. Army zamknęło program).

W 1933 roku Nicolas Florine – Belg rosyjskiego pochodzenia – wykonał 8-minutowy lot swoim dwuśmigłowym helikopterem na wysokości 6m.

Im bliżej II Wojny Światowej, tym myśl techniczna była skupiona bardziej na stworzeniu szybkich płatowych myśliwców, które miały zdecydowanie większe zastosowanie w tamtych burzliwych czasach. Nie znaczy to jednak, że całkowicie zarzucono testy maszyn dwu- i więcej wirnikowych. Poniżej przykład niemieckiej hybrydy: samoloto-helikoptera z dwoma silnikami – FW-61 z 1937 roku oraz Fa-223 „Drache” z 1940 roku. Obydwie maszyny brały czynny udział w IIWŚ.
W 1956 roku powstał kolejny wojskowy wielowirnikowiec napędzany dwoma silnikami. Jego autorami byli George de Bothezat i Ivan Jerome (ci sami, co w przypadku Jerome-de Bothezat Flying Octopus), a maszyna nosiła nazwę Convertawings Model A Quadrotor. Niestety ten quadcopter również nie został ostatecznie wykorzystany do celów militarnych.
Z informacji, które udało mi się znaleźć przez krótki okres – od 1958 do 1960 roku – U.S. Army użytkowało lub też testowało bardzo dziwaczny sprzęt o nazwie The Curtiss-Wright VZ-7 “Flying Jeep”, który wyglądał tak:

Czemu ostatecznie porzucono próby z wielowirnikowcami?
W zasadzie nie porzucono – zmienił się jedynie koncept, ale o tym za moment.
Klasyczne wielowirnikowce miały jedną, ale znaczącą wadę: były niestabilne i niewiele dało się z tym zrobić. Wyobrażacie sobie obecnie latanie quadcopterem zdalnie sterowanym bez kontrolera (Flight Controller), czyli komputera pokładowego, wyposażonego w akcelerometr, żyroskop, kompas, nie mówiąc już o barometrze czy GPS? To teraz wyobraźcie sobie maszynę kilkanaście razy większą, załogową, napędzającą wszystkie śmigła jednym tylko silnikiem, a rolę komputera pokładowego spełnia pilot, który dzięki prostym przekładniom próbuje sterować obrotami każdego jednego wirnika i utrzymać stabilny poziomy lot. Mimo, że wydaje się to nieprawdopodobne, to pilotom faktycznie udawało się tego dokonywać, ale obciążenie pilota było tak duże, że prócz pilotowania w zasadzie nie mógł się skupić na niczym innym, a sam lot był męczący. Z tego względu zarzucono wiele projektów wykorzystania pierwszych wielowirnikowców do celów wojskowych, a ostatecznie nie przyjęły się one również w ani w cywilnym – sportowym i rekreacyjnym lataniu.
Jednak gdzieś po drodze koncepcja MR (multi-rotors) ewoluowała w stronę tzw. tilt-rotors – hybryd powstałych w wyniku połączenia samolotów ze śmigłowcami. Poniżej kilka tego rodzaju konceptów, które doczekały się zastosowań – głównie militarnych, choć nie tylko:




Co do klasycznych wielowirnikowców – dopiero teraz, po kilkudziesięciu latach, gdy postęp technologiczny pozwolił na miniaturyzację i zmniejszenie kosztów elektroniki oraz stworzenie prostych kontrolerów lotów służących do sterowania jednocześnie czterema i większą ilością śmigieł, wielowirnikowce wracają do łask i są obecnie najpopularniejszą kategorią maszyn wśród cywilnych dronów.
Przypisy:
- http://www.aviastar.org/helicopters_eng/lomonosov.php
- http://www.eyeondrones.com/brief-history-quadcopters-multirotors/
- http://www.aviastar.org/helicopters_eng/florine.php
Przeczytaj także:




{kind=link}
Brak komentarzy