
Budowa własnego drona w 5-ciu krokach

Drony z dnia na dzień są co raz bardziej widoczne w naszym codziennym życiu. Mnogość ich zastosowań, malejące ceny technologii oraz duża dostępność różnego rodzaju sprzętów – od zabawek po profesjonalne wielowirnikowe koptery do fotografii – sprawiają, że może sobie na nie pozwolić niemalże każdy.
UWAGA: ten artykuł powstał w 2014 roku, czyli już ponad dekadę temu. Technologia dronowa przez ten czas zmieniła się drastycznie do tego stopnia, że obecnie drony budowane własnoręcznie przez hobbystów to praktycznie wyłącznie drony FPV do lotów z widokiem z pierwszej kamery (choć i w tej kategorii dronów można znaleźć gotowe rozwiązania jak DJI Avata, DJI Avata 2 czy najtańszy DJI Neo). Pozostałe konstrukcje dronów do filmowania czy fotografii, które niegdyś stosowały podwieszone na gimbalach aparaty (lustrzanki lub bezlusterkowce) tudzież kamery sportowe typu GoPro – odeszły już praktycznie w niepamięć. Proszę poniższe wskazówki traktować jako podstawowe informacje o budowie drona (które się jako tako nie zmieniły), natomiast proszę mieć również na względzie, że bazują one na komponentach (komputer pokładowy, regulatory, silniki), które już wyszły z użycia lub są trudno dostępne. Oczywiście ogólny schemat budowy wielowirnikowca jest ten sam, ale technologicznie świat poszedł znacząco naprzód.
Oczywiście drony np. do fotografii lub nagrywania filmów wideo można sobie kupić. Jednak czemu nie zrobić samemu koptera, który nie będzie wcale ustępował drogim sprzętom ze sklepowych półek? Pierwszym hamulcem jest zwykle wiedza, bo drony w budowie i sterowaniu mogą wydawać się dość skomplikowane. Jednak jeśli macie zapał, żeby zbudować coś swojego od podstaw mamy dla Was prosty poradnik: „jak zrobić własnego drona”.
W pierwszej kolejności musimy wyjaśnić – co określamy mianem „drona” w tym artykule? Dron będzie oznaczać najpopularniejszy z kopterów czyli quadcopter (lub quadrocopter jak kto woli). Oczywiście słowo „dron” nie jest zarezerwowane wyłącznie dla konkretnego typu statku powietrznego – warunkiem jest by był on bezzałogowy, mógł wykonywać loty autonomiczne lub zdalnie sterowane. Drony wojskowe to przede wszystkim płatowce, natomiast cywilne drony to w przewadze multikoptery czyli wielowirnikowce. My zajmiemy się budową tego najpopularniejszego – quadcoptera czyli drona o 4 śmigłach.
1. Skompletuj części do drona

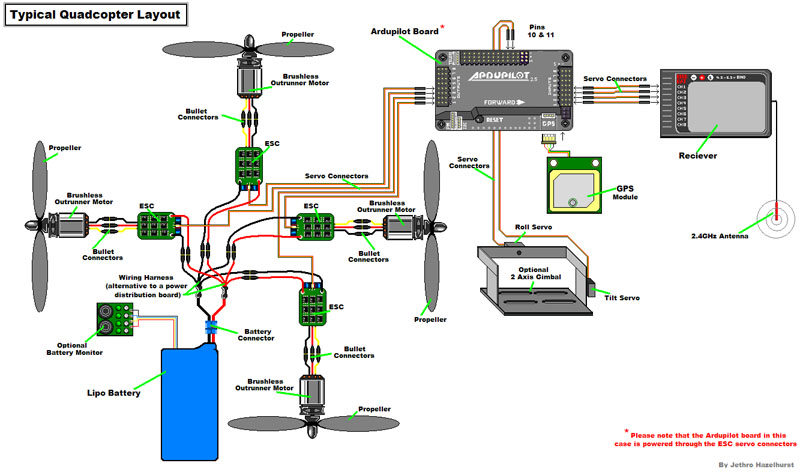
Pierwsza podstawowa rzecz to skompletowanie wszystkich części do swojego drona, który w naszym przypadku będzie quadcopterem. Do tego będą ci potrzebne:
- rama koptera (4-ramienna)
- 4 silniki
- 4 śmigła (choć lepiej mieć od razu 8 na zapas)
- 4 regulatory silników (lub jeden tzw. „4 in 1”)
- płytka zasilająca (do połączenia wszystkich regulatorów)
- płytka sterująca (kontroler lotu – serce drona, służące do stabilizacji lotu, dodatkowo może mieć również funkcję autopilota)
- bateria (akumulator)
- odbiornik
- nadajnik z aparaturą
Oczywiście wszystkie powyższe komponenty zależą od tego co chcemy uzyskać: jakiej wielkości będzie nasz dron, jaki uciąg ma mieć, czy będziemy stosować zaawansowany autopilot czy jedynie prostszą stabilizację koptera, jaki zasięg drona przewidujemy i jakie dodatkowe wyposażenie zostanie na nim zamontowane. Po odpowiedzeniu sobie na te wszystkie pytania należy wybrać sprzęt odpowiadający naszym wymaganiom. Wszystkie podzespoły można zakupić w sklepach modelarskich w większych miastach Polski lub przez Internet – zarówno w polskich sklepach jak i tych zagranicznych. Więcej o doborze części oraz o miejscach gdzie można je kupić przeczytacie tutaj.
2. Poznaj zasadę działania quadcoptera
Wbrew pozorom jest kilka rodzajów quadcopterów z czego najpopularniejsze to te w układzie „+” lub „X”:

Najpopularniejszym dronem jest kopter w układzie X ponieważ umożliwia zamocowanie aparatu fotograficznego lub kamery skierowanej do przodu – tak ustawiony kadr nie obejmuje (przeważnie) silników ani śmigieł a to umożliwia nagrywanie ładnych filmów lub robienie zdjęć z powietrza. Sam układ silników to jednak nie wszystko. Aby kopter uniósł się w powietrze potrzebuje odpowiednich śmigieł, a te muszą poruszać się w odpowiednim kierunku. Oczywiście wszystkim steruje kontroler lotu – płytka sterująca, która dzięki zaprogramowanym algorytmom utrzymuje odpowiednie obroty silników i tym samym pozwala stabilnie unosić się całej konstrukcji w powietrzu. Więcej na temat zasady działania kopterów można przeczytać np. tutaj.
3. Złóż kopter w jedną całość
Gdy mamy już skompletowane wszystkie podzespoły i wiemy jaka jest zasada działania naszego drona możemy zabrać się do jego składania. Dla tych, co od małego lubili składać klocki – szczególnie Lego Technic – składanie quadcoptera powinno być prawdziwą przyjemnością! Warto poświęcić trochę czasu na dokładne rozplanowanie wszystkich części i odpowiednie ich rozmieszczenia tzn. tak, by kopter swój środek ciężkości miał dokładnie w centrum ramy – to zapewni dobre wyważenie i bezproblemowy lot – oraz każda część powinna się bardzo dobrze trzymać całej konstrukcji. Wszelkie „luzy” podczas lotu przełożą się na spore drgania co – prócz niestabilnego lotu może przełożyć się np. na samoistne odkręcanie się śrub, wygięcia konstrukcji lub nawet odpadnięcie niektórych części. Quadcopter to maszyna z czterema silnikami, które zwykle wywołują spore drgania całości – warto pamiętać, że konstrukcja musi być zwarta i odpowiednio sztywna. Jedną rzeczą, którą możemy sobie na tym etapie odpuścić jeśli chodzi o składanie części, jest montowanie śmigieł na silnikach.
4. Skonfiguruj aparaturę, regulatory, silniki i płytkę sterującą
Dochodzimy do etapu, w którym nasz dron jest już poskładany i odpowiednio wyważony. Wszystkie części są na swoim miejscu (może z wyjątkiem śmigieł, te możemy zostawić na potem), a więc czas rozpocząć konfigurację sprzętu. Wszelkie koptery to tak naprawdę latająca elektronika – części typowo mechanicznych jest niewiele, w zasadzie rama tworzy całą konstrukcję – reszta to elektronika. Ponieważ lot każdego drona (a szczególnie koptera) zawdzięczamy dobrze skonfigurowanej elektronice – tak i tutaj powinniśmy przyłożyć się w 100% do poprawnej kalibracji i konfiguracji silników, regulatorów, kontrolera lotu i aparatury. Od tego będzie zależało czy nasz dron w ogóle uniesie się w powietrze. Nie ma możliwości w tym miejscu abyśmy mogli dokładnie opisać proces konfiguracji każdego z podzespołów. Czemu? Bo ta zależy od konkretnych modeli regulatorów, aparatur czy kontrolerów lotu. Tutaj jednak z pomocą przychodzą liczne poradniki, tutoriale wideo, fora internetowe (polskie http://pfmrc.eu albo międzynarodowe http://rcgroups.com), na których można uzyskać odpowiedź niemalże na każde pytanie dotyczące dowolnego rodzaju elektroniki używanej w dronach.
5. Ulotnij swojego drona!
Wszystko, co robiliśmy w 4 poprzednich krokach prowadziło nas nieuchronnie do oblotu naszego drona. To chyba najbardziej stresująca część całego przedsięwzięcia. Godziny pracy i setki złotych wydane na nasz sprzęt mogą teraz przełożyć się w euforię gdy wszystko zadziała lub w rozpacz gdy „coś pójdzie nie tak”. Sprawdźmy zatem wszystko przed odlotem po 3 razy: zamocowanie śmigieł, ich obrót w odpowiednią stronę, przytwierdzenie baterii, odbiornika, regulatorów, kontrolera, odpowiednie połączenia całej elektroniki. Niestety z kopterami jest tak, że im niżej są nad ziemią (na wysokości do ok. 1m) tym mniej stabilnie się unoszą. Jest to spowodowane powietrzem wdmuchiwanym przez śmigłą pod naszego drona – tworzy się wtedy poduszka powietrzna, która może destabilizować kopter. Druga rzecz to podłoże do startu – idealne będzie gładkie i twarde np. asfaltowe. Podłoże trawiaste wymaga wysokiego podwozia natomiast ziemia czy piasek może być wzniecany do góry podczas startu i chcąc nie chcąc może dostać się do silników i zakłócić ich pracę.
Zatem gdy wszystko mamy sprawdzone i przygotowane do lotu – rozkręćmy powoli silniki i stopniowo zwiększajmy ich moc. Jeśli widzimy, że kopter nie przemieszcza się po podłożu – nie przechyla się ani nie obraca – to dobry znak: oznacza, że silniki obracają się równo i w odpowiednich kierunkach. Gdy wyczujemy moment, w którym ciąg silników pozwoli na uniesienie się koptera i oderwanie od ziemi – dodajmy więcej gazu. W ten sposób nieco szybciej nabierzemy wysokości i ustabilizujemy lot.
Jeśli przy oblocie możemy skorzystać z pomocy drugiej osoby – może nam to znacznie ułatwić sprawdzenie czy kopter zachowuje się odpowiednio w locie i czy stabilizacja działa jak należy. Nasz pomocnik może wtedy wziąć kopter do rąk, chwycić go za podwozie i unieść ręce do góry. Teraz możemy powoli zwiększać ciąg silników. Oczywiście osoba nam pomagająca cały czas trzyma kopter wysoko nad głową i puszcza go w żadnym momencie. Gdy osiągniemy ciąg silników, który wyraźnie ciągnie quadcopter do góry możemy najpierw delikatnie a potem stanowczo zacząć nim „skręcać” i „pochylać” na boki – oczywiście osoba trzymająca drona w rękach podąża za tymi skrętami i wychyleniami nie puszczając koptera z rąk. Tak sprawdzimy czy dobrze zaprogramowaliśmy odpowiednie skręty i przechyły na drążkach. Aby sprawdzić stabilizację w locie osoba, która trzyma drona powinna zacząć go przechylać na boki (nie obracać, bo stabilizacja nie działa na obroty wokół osi pionowej). Przy lekkim przechyleniu drona kontroler lotu powinien sam tak sterować obrotami silników aby neutralizować przechył i powracać do poziomu. Przy tych próbach pilot trzymający aparaturę nie powinien nic robić przy pomocy aparatury – jedynie po skończonych próbach trzeba wyłączyć silniki i zablokować przed samoistnym ich uruchomieniem.
To chyba wszystko – jeśli powyższe testy wasz quadcopter przejdzie pozytywnie nie musicie się obawiać o sam lot. Pierwsze próby lądowania mogą być stresujące, aby nabrać orientacji w przestrzeni i w sterowaniu kopterem też potrzeba trochę wprawy, ale to już przyjdzie z czasem. Poniżej nasz pierwszy lot powyżej opisanym quadcopterem.
Przeczytaj także:






{kind=link}
9 komentarzy
a może będzie poradnik do zdalnie sterowanego szybowca
Ale szybowiec to nie dron, a to portal o dronach zatem to nie miejsce na takie poradniki. Natomiast szybowiec jest znacznie prostszy do wykonania zakładając, że będzie sterowany manualnie, więc w czym problem? Co chce Pan wiedzieć?
Wystarczy przeczytać artykuł uważnie i ze zrozumieniem:
„Oczywiście słowo „dron” nie jest zarezerwowane wyłącznie dla konkretnego typu statku powietrznego – warunkiem jest by był on bezzałogowy, mógł wykonywać loty autonomiczne lub zdalnie sterowane. Drony wojskowe to przede wszystkim płatowce, natomiast cywilne drony to w przewadze multikoptery czyli wielowirnikowce”
Jeśli bezzalogowy to i szybowiec jest dronem, jeśli dobrze rozumiem definicję
Moglibyście podać dokładne nazwy firm i modeli jakie użyliście do drona ??
Proszę bardzo: http://zrobsobiedrona.blogspot.com/2014/07/3-budujemy-quadcopter-nasz-zestaw.html
Ziomeczkiii mam pytankoo. Mam klon Arduino Uno i obudowę do niego coś takiego: https://abc-rc.pl/akrylowa-obudowa-uno-r3, teraz chcę kupić oryginał, czy będzie pasowała? Ktoś coś?
Też od września jestem na etapie składania własnego drona, trochę posiłkuję się tymi poradnikami, trochę tymi z abc-rc. Idzie mi całkiem nieźle, aczkolwiek chciałbym stworzyć teraz coś bardziej skomplikowanego :D. Macie może więcej jakiś poradników do polecenia? Mogą być filmiki itp, może jakieś grupy na face, na których są publikowane takie rzeczy?
Witam. Zlozylem drona i dziwnie sie zachowuje. Nie moge znalezc zadnej informacji o moim przypadku. Mianowicie: dron dziala silniki poprawnie zamontowane itd. Po uzbrojeniu silniki pracuja normalnie. Proba eychylenia yaw roll pitch ok silniki odpowiednie przyspieszaja i obroty wracaja do normalnej pracy. Cuda sie dzieja jak dodam gazu wystarczy odrobine. Sam throttle jest ok ale obojetnie co wychyle yaw roll czy pitch silniki same przyspieszaja i nie wraca predkosc do wartosci pierwotnej. Kontroler f722se i betaflight. Moze ktos jakis pomysl podsunie. Czytalem ze to normalne i w locie sie uspokoi. Nic z tego.