
Bezzałogowiec I-014 Kermit w końcu zaprezentowany

Ponad 5 lat temu na łamach Świata Dronów recenzowałem książkę „W stronę dronów” Michała Imiołka. Kilka dni temu autor książki, a zarazem twórca projektu drona o wdzięcznej nazwie „Kermit”, obwieścił iż jego bezzałogowiec I-014 Kermit, który do tej pory istniał jedynie na papierze w formie rysunków technicznych, ostatecznie został zaprezentowany.
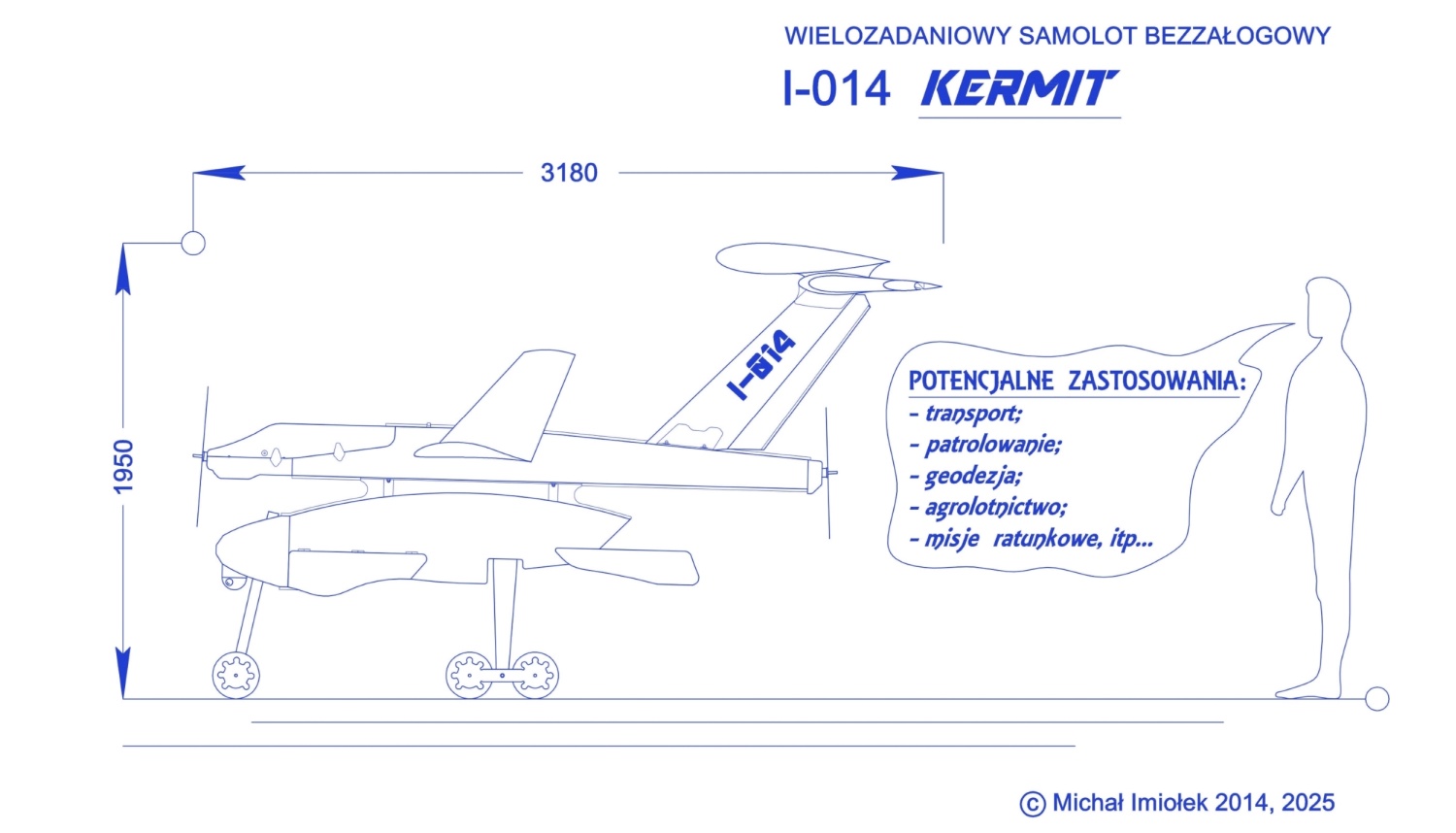
W dniu 24 sierpnia 2025, z okazji imprezy poprzedzającej tegoroczne obchody Święta Lotnictwa Polskiego, w Muzeum Lotnictwa w Krakowie odbyła się pierwsza publiczna prezentacja przedprototypu WIELOZADANIOWEGO SAMOLOTU BEZZAŁOGOWEGO I-014 Kermit.
Opis samolotu i idea systemu
I-014 Kermit to samolot bezzałogowy o napędzie dwusilnikowym, hybrydowym (spalinowo-elektrycznym). Silnik spalinowy znajduje się w dziobie kadłuba, elektryczny zaś na jego końcu, przy czym obydwa napędy ułożone są w jednej osi (linii), co oznacza, że w przypadku awarii któregoś z silników (względnie wyczerpania źródła zasilania bądź też celowego jego wyłączenia), nie powstanie moment odchylający samolot od pierwotnej trajektorii lotu.
Projektowy udźwig, obwarowany chęcią osiągnięcia założonych osiągów, wynosi 30 [kg], zaś masa całkowita płatowca 120 „kilo”, wliczając w to masę akumulatorów elektrycznego silnika tylnego.
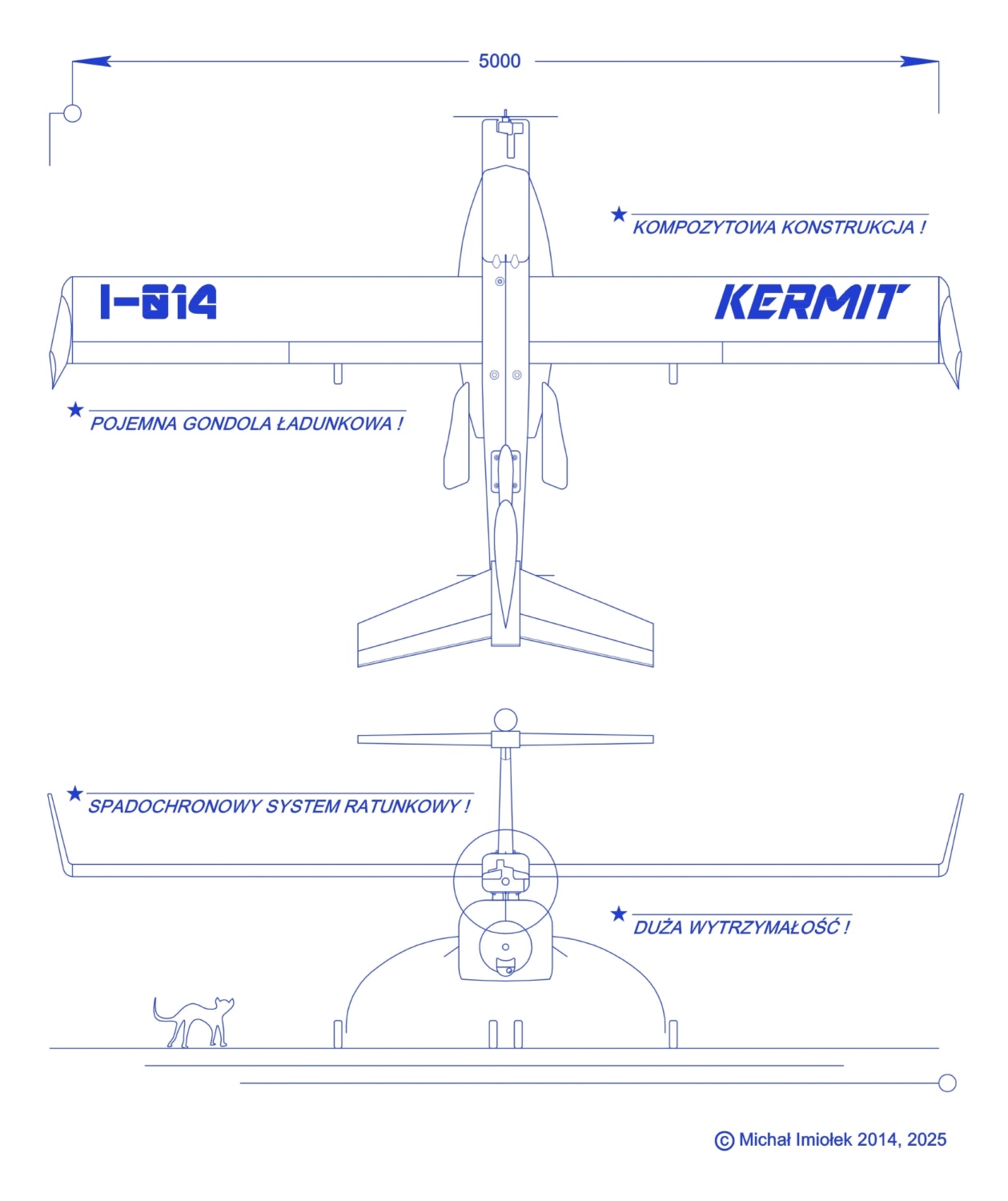
Struktura samolotu jest w praktyce niemal wyłącznie kompozytowa, z nielicznymi tylko domieszkami metali i sklejki (odpowiednio: złącza, goleń i mechanizmy oraz mniej obciążone żebra, wzmocnienia i wręgi).
Samolot powstaje z myślą o wytwórstwie seryjnym – nie zaś w jednym egzemplarzu – co oznacza, że wykonanie każdej z prototypowych części poprzedza proces sporządzenia odpowiedniego foremnika, powstałego częstokroć na bazie zbudowanej w tym celu makiety. Wykonanie oprzyrządowania produkcyjnego pochłania więc 60 ÷ 65 % pracy, czasu i pieniędzy! Na szczęście oprzyrządowanie produkcyjne sporządzamy zwykle tylko jeden raz, co oznacza, że koszty jego wykonania z czasem się amortyzują.



Wielozadaniowy, trwały, funkcjonalny
Taki właśnie będzie ten samolot, gdyż z takiego zamysłu powstaje.
Wielozadaniowy, bo:
- z uwagi na pojemną gondolę może przenosić wyposażenie stałe oraz zasobniki do desantowania nie tylko o pokaźnej masie, lecz i znacznych gabarytach (z możliwością wpasowania tychże do kształtów komory ładunkowej płatowca);
- przedstawiona na rysunkach gondola jest gondolą o największym „wagomiarze”: modułowość konstrukcji pozwala na instalowanie mniejszych i lżejszych gondoli lub latanie bez niej, zależnie od woli użytkownika i od charakteru prowadzonych działań;
- samolot posiada spadochronowy system ratunkowy (umiejscowiony na „grzbiecie” zespołu usterzeń lub w dziobie płatowca) oraz sprężyste, wytrzymałe, szerokie podwozie główne: rozwiązania te sprzyjają twardym, awaryjnym lądowaniom w przygodnym terenie;
- Kermit wyposażony został w wychylne napędy, dzięki którym zmniejszona może zostać prędkość minimalna drona, bądź też rozszerzone cechy manewrowe;
- zmiana kierunku obrotów elektrycznego silnika tylnego zwalnia nas z konieczności stosowania klasycznych hamulców w podwoziu, gdyż wymagana wartość siły hamującej wytwarzana jest przez rewers ciągu (rozwiązanie to umożliwia również wygodne cofanie płatowca na płycie lotniska bez pomocy ludzi lub innego sprzętu).
Trwały, bo:
- projektowe współczynniki obciążeń dopuszczalnych wynoszą +6 i -2,7 g, samolot zdolny jest więc do znoszenia pokaźnych obciążeń, zarówno od manewrów jak i od podmuchów czy tych zachodzących podczas przyziemienia;
- wiele elementów wzmocniono celowo, co czyni je odpornymi nie tylko pod kątem brutalnej obsługi, lecz i na wypadek mniej groźnych sytuacji awaryjnych, takich jak np. potencjalne kolizje z niewielkimi ptakami lub też lądowania w miejscach do tego nieprzystosowanych;
- kompozytowa, odpowiednio zabezpieczona konstrukcja sprawia, że samolot odporny jest na wpływ czynników atmosferycznych. Celowe zastosowanie tkanin szklanych w przeważającym ogóle struktury (dyktowane również chęcią obniżenia ceny), odznaczających się znaczną wytrzymałością zmęczeniową, w oczywisty sposób wpływa też korzystnie na wytrzymałość zmęczeniową całego płatowca.
Funkcjonalny, bo:
- samolocik jest niewielki, lekki, po zdemontowaniu skrzydeł daje się on bez problemu załadować na stosunkowo niedużą naczepę, o wymiarach nieprzekraczających norm przepisów ruchu drogowego;
- samolot może zostać przygotowany do lotu nawet przez jedną osobę;
- opisane już wcześniej przymioty konstrukcji (spadochron ratunkowy, duża wytrzymałość, właściwości podwozia głównego) sprawiają, iż I-014 Kermit może być eksploatowany w ciężkich warunkach, a zatem w sytuacjach trudnych bądź też często niemożliwych do spełnienia przez inne konstrukcje.

Podstawowe dane techniczne (wersja z największą gondolą)
- rozpiętość: 5 [m]
- powierzchnia nośna: 2,5 [m²]
- masa całkowita: 120 [kg]
- masa płatna (udźwig): 30 [kg]
- prędkość maksymalna: 150 [km/h]
- prędkość minimalna (bez mechanizacji): 76 [km/h]
- prędkość wznoszenia: 6,7 [m/s]
- zasięg*: 700 [km]
- czas lotu*: 8,5 [h]
*Zasięg i czas lotu mogą zostać łatwo wydłużone przez zwiększenie pojemności zbiorników paliwa, zainstalowanie dodatkowych akumulatorów, bądź zastosowanie obu tych rozwiązań na raz.
Więcej informacji nt. samolotu na stronach internetowych autora projektu:
- https://sites.google.com/view/i-014-kermit-multi-role-uav
- https://sites.google.com/view/i-014-kermit – tutaj dostępny jest jak dotąd nigdzie niepublikowany (bieżący, jedenasty z kolei) artykuł z wieloletniego cyklu opisującego budowę rzeczonego drona
{kind=link}
Brak komentarzy